This project deals with the development of coordinated autonomous multi-robot navigation techniques, which is a topic of great relevance today. The demand for autonomous mobile robots was already growing, and this increased considerably with the health crisis of 2020, when circumstances demanded the creation of new solutions to problems of our daily life. Teams of autonomous robots can be used for a variety of applications, ranging from product loading and delivery to surveillance and environment monitoring. The main objective of this project is to propose new solutions for coordinated multi-robot navigation, focusing on applications for scanning and monitoring environments and loading objects. Among the expected results, we can mention the development of robust strategies for the problem of path planning and multi-robot coordination, which is an area with a series of open challenges and great potential for scientific advances. In addition, it is expected that solutions proposed under this project can be used in practical applications being developed in partnership with the private sector.
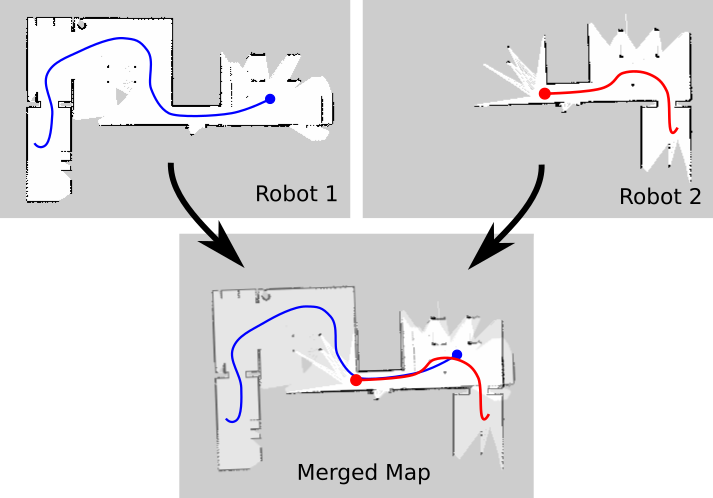
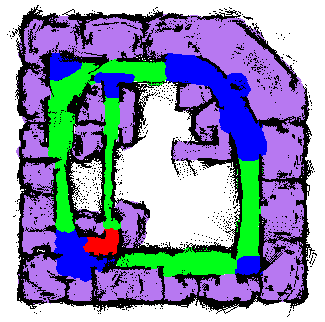
Merging maps generated by multiple robots.
Project developed in partnership with the company Instor Projetos e Robotica.
The project's objective is to develop JACI, the first Brazilian autonomous robot for disinfection by UV-C radiation and ozone generation.
JACI is being proposed as a powerful tool to fight COVID-19, as the use of UV-C lights inhibits the proliferation of viruses and germs.
JACI increases efficiency and reduces cost because it is a mobile robot.
The combination of an autonomous mobile robot, UV lights and ozone presents itself as a strong solution to prevent the spread of the SARS-COV-2 virus.
This solution ensures that UV light is used to neutralize viruses and other bacteria and germs present in the environment, while minimizing human exposure to the side effects of UV light.
The robot's ability to be autonomous allows it to dodge obstacles or people present in the environment, while tracing its trajectory in a way that preserves the working restrictions of UV light, i.e. minimal distance between light and surfaces.
For this, the robot must be able to move autonomously safely through an environment, and it is necessary to map any obstacles contained in it, in order to cover the entire location (considering the radius of action of the disinfectant element).
The project presents a series of challenges in the field of mobile robotics, such as self-location, mapping, trajectory planning and exploration of the environment.
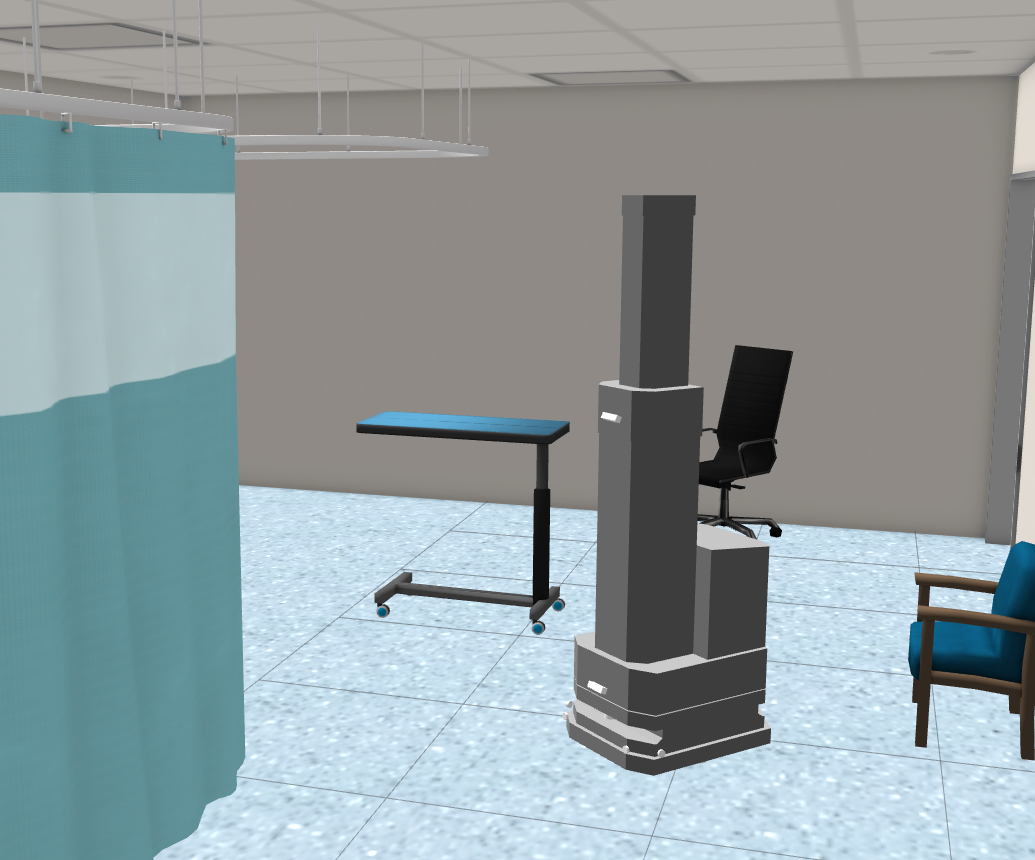
Simulation of the Jaci robot during disinfection of a hospital environment.
The project aims to develop a long-term Semantic SLAM that is robust to changes in the environment, allowing robots to operate in uncontrolled indoor environments, in applications that require long periods of execution. In addition to the long-term factor, the importance of using semantic information is also given by the resulting map, which will allow the execution of other collaborative tasks between robots and between robots and humans. This project continues the research in robotics carried out by the mobile robotics group of the Informatics Institute at UFRGS, in particular, addressing the paradigm of autonomous navigation, mapping and locating heterogeneous robots.
Semantic map of an environment.