A versão disponibilizada do ITSUMO considera o uso de Linux
apenas. Para a instalação são
necessários os seguintes pacotes instalados:
- Usando qualquer distribuição Linux:
- PyQ (em algumas distribuições
PyQT distributions, é chamado kdebindings3-python ou
python-qt3)
- python-xml (chamado PyXML no Fedora Core 5)
- Usando SUSE
- Usando Ubuntu 64 bits:
- libqt3-compat-headers
- libglpng
- libglpng-dev
- Usando Fedora Core 5:
- libXt
- libXt-devel
- libjpeg
- libjpeg-devel
- libmng
- libmng-devel
Após a instalação de todos os pacotes:
1 - descompactar o arquivo zip fornecido;
2 - abrir um terminal modo texto; avançar ate a
pasta
'$itsumo_root$/src' e digitar 'make';
Organização:
* na pasta '$itsumo_root$/src/' se encontram todos fontes do
simulador.
* na pasta '$itsumo_root$/docs/' se encontra a documentacao do
simulador.
* na pasta '$itsumo_root$/input/' se encontram arquivos de entrada
do simulador, como xml de topologias, configuracoes, etc.
Para rodar a interface do simulador, que centraliza todas as
operações necessárias para o
usuário
regular:
1 - na pasta raiz do simulador, digitar './witsumo'; esse comando
executará a interface.
Para problemas na instalação e uso do simulador,
consultar a
Solução
de
problemas.
(Voltar
Topo)
A interface é incicializada na pasta raiz do simulador ,
digitando './witsumo'. Para uma simulaçào,
são necessários 2 ou 3
arquivos de configuração:
1 - topologia: arquivo xml com as definições da
topologia;
2 - configuração: arquivo xml com as
configurações para rodar a
simulação
(no. de passos, qual rede usar, etc);
3 - agentes: define o mapeamento de agentes semáforos para
controle semafórico (opcional!).
Na interface principal temos 2 menus ao alto:
1 - File: contém as operações para
abrir,
salvar e salvar como, referentes ao arquivo de
configuração. Ou seja, essas
operações
operam o que o nome indica sobre o arquivo de
configuração do simulador (item 2 acima).
2 - Help: com a primeira opção desse menu
é
possível visualizar a documentação em
html do
simulador.
Além disso, 3 abas compõem a interface principal:
1 - Configuration: aqui são definidas as
configurações da simulação,
como
sensores a serem usados, no. de passos, etc. A
explicação
sobre cada item encontra-se nesta documentação.
2 - Agents Definition: aqui é feito o mapeamento dos agentes
para os semáforos, caso seja necessário uso dessa
opção.
3 - Simulation: aqui se encontram as opções 'Run
Simulation' que executa a simulação com as
configurações definidas nas abas anteriores, e a
opção 'Visualize' que abre uma janela com a
visualização 3D. Uma vez que a janela esteja
aberta,
é necessário digitar 's' (start) para dar
início ao processo.
Para dar início a uma simulação e
visualização é necessário
definir os
parâmetros de simulação.
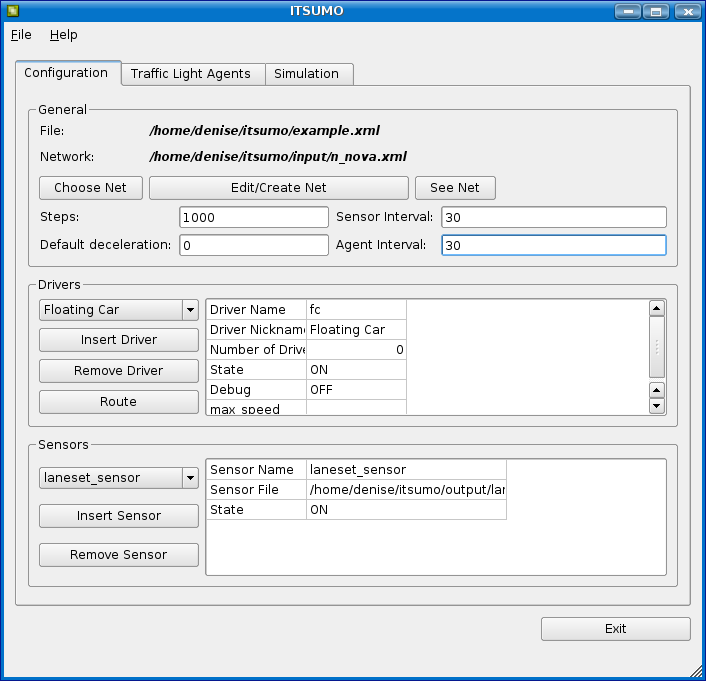
Configuração Geral
Feita na aba Configuration. Ao abrir o programa (./witsumo)
você verá uma janela como a da
figura
abaixo:
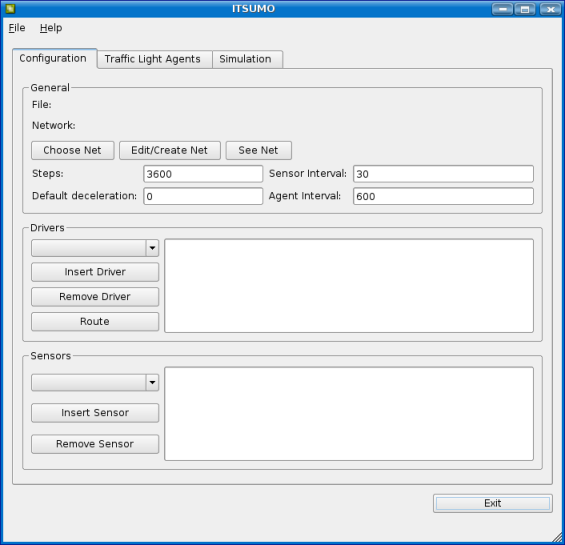
- Clique em 'Create New Net' (ver aqui)
para criar uma nova topologia, ou clique no botão 'Choose
Net' e procure pelo arquivo gerado previamente pelo editor de
topologias. Para visualizar a topologia
selecionada, clique em 'See Net'
- No campo Steps, escreva quantos passos você
deseja que a
simulação tenha e preencha também o
campo
Default Deceleration, que indica a desaceleração
padrão para os veículos.
- No painel Drivers, você pode inserir motoristas
personalizados:
- Clique em Insert Driver.
- Agora selecione o tipo de motorista e clique em OK.
- Há alguns tipos tipos
de morotistas:
- Modelo Standard:
É caracterizado por um comportamento aleatório,
suas
rotas são sorteadas a cada ponto de decisão (cruzamento).
É utilizado especialmente para povoar o cenário,
e
é baseado no modelo básico de Autômatos
Celulares.
- Modelo FC (Floating Car):
Esse modelo de motorista apresenta um movimento pré-definido
pelo usuário ou engenheiro de tráfego.
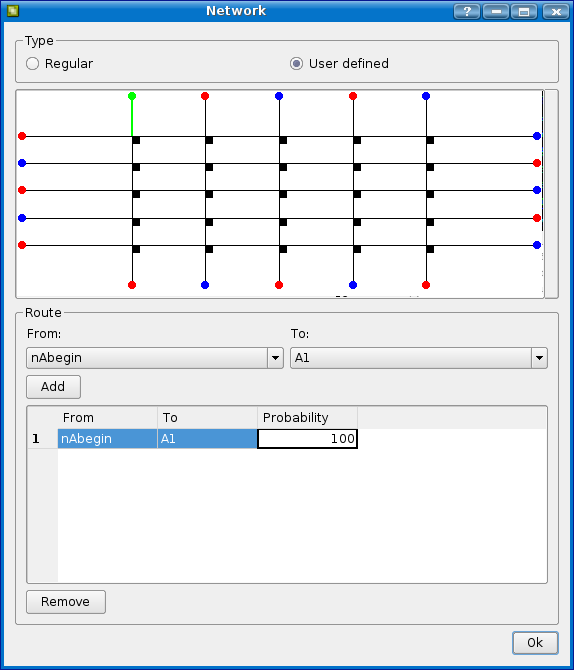
Definindo a rota do motorista:
- Clique em Routes, quando o modelo FC
está selecionado, uma janela
mostrando a visão geral da malha viária em forma
de
grafo se abrirá, nessa janela, os nodos sources
são
coloridos em azul e os sink de vermelho.
- Abaixo, na janela, faça a
seleção do nodo
de origem (From) e nodo destino (To) e clique em Add, note que a
visualização mudará para verde a cor
da rota
selecionada.
- Na tabela de rota, podem
ser modificadas
as probabilidades do motorista seguir cada rota.
- Repita essa operação
até que todo o
trajeto desejado esteja inserido, e clique em Ok.
- Modelo IRC (Iterated Route Choice):
Nesse modelo, o motorista aprende ao interagir com o cenário
de forma a escolher entre duas rotas pré-definidas
através do uso de uma heurística baseada na
duração do percurso das
rotas nas últimas 'n'
interações . O cenário
é composto de uma laneset de
entrada e duas rotas (rota 0, com maior capacidade
de tráfego, e rota 1, com menor capacidade de
tráfego
em relação à rota 0) que ao final se
encontram na laneset de destino na rede. Para um
melhor entendimento deve ser consultado [KLUEGL, F., BAZZAN, A. L.
C. Route Decision Behaviour in a Commuting Scenario: Simple
Heuristics Adaptation and Effect of Traffic Forecast. In The
Journal of Artificial Societies and Social Simulation, 2004]
Os parâmetros que definem esse motorista são:
- max_speed: velocidade maxima do motorista.
- source_laneset: laneset por onde os motoristas
entram na
rede.
- sink_laneset: laneset de convergencia, onde os
motoristas saem
da rede.
- route0_begin: laneset que da inicio a rota 0.
- route1_begin: laneset que da inicio a rota 1.
- init_heuristic: valor de heuristica inicial.
- learn_prob: probabilidade de aprendizagem.
- hist_size: tamanho do historico de aprendizagem
(quantos
valores ele armazena para reavaliacao da heuristica).
- Modelo Braess:
Modelo de motorista adaptado para o paradoxo de Braess. Para um
correto entendimento deve ser consultado [BAZZAN, A. L. C., BOFFO,
F., KLUEGL, F. Avoiding the Braess Paradox with Information
Manipulation In: Proc. of the Workshop Agents in Traffic and
Transportation, 2004, New York].
- Clique no campo State, e selecione ON, caso
contrário
esses motiristas não serão adicionados
à
simulação.
- Preencha também o campo max speed com a
velocidade
máxima desse motorista.
- No painel Sensors, é feita a
inserção de
sensores, eles são utilizados para coletar e registrar
medições feitas na malha ao longo da
simulação, e esses dados serão salvos
no
arquivo indicado no campo "Sensor File", abaixo estão
listados os tipos de sensores:
- lane sensor: mapa de
células com
ocupação (veículos), densidade e
velocidade
média na lane
- laneset sensor: densidade
das lanesets que
estão ligadas a um nodo com semáforo
- section in columns sensor:
densidade e
velocidade médias para cada section
- section in columns sensor printing names:
densidade e velocidade médias para cada section e o nome
desta
- visualization of section desities:
apresenta
densidade de cada section formatada para leitura do módulo
visualizador
- visualization of section relative
densities:
densidades relativas para cada section, ou seja, caso haja um
semáforo a densidade máxima = 1, caso
contrário densidade = 1/velocidade máxima,
formatado
pera leitura pelo módulo visualizador
- visualization os stopped cars in section:
número relativo de carros parados na section, ou seja,
número de carros parados / número de
células,
formatado para leitura pelo módulo visualizador
- stopped cars in laneset:
imprime o
número total de carros e o número de carros
parados
na laneset
- total stopped cars in network:
imprime o
número total de carros parados na rede
- Clique em Insert Sensor, selecione o tipo de sensor e
clique
em
OK.
- Como para os Drivers, selecione ON no campo State.
- Agora salve seu arquivo de
configuração pelo menu File->Save.
(Voltar ao Topo)
Para criar uma nova topologia, clicar em "Create New Net" a aba
'Configuration' da interface. A janela do editor de topologias
será aberta.
Para criar uma nova rede, vá em File->New,
será
criada uma nova rede com o nome de empty.xml. O nome da rede
pode
ser modificado com o salvamento da rede, quando o programa
perguntará por um nome para o arquivo a ser salvo.
(File->save) A criação da rede deve
obrigatoriamente começar pela
criação
dos nodos, com eles, será possível criar ruas,
"sinks", "sources" e "traffic lights".
- Clique em Nodes.
- Clique em "Create another node".
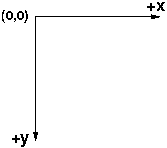
- Escolha um nome para o nodo (Node name), logo em seguida
escreva as coordenadas do nodo (X coordinate, e Y
coordinate). As coordenadas devem seguir o sistema mostrado na
Seção Nodos.
- Repita os passos de 1 a 3 até que todos os nodos
tenham
sido criados.
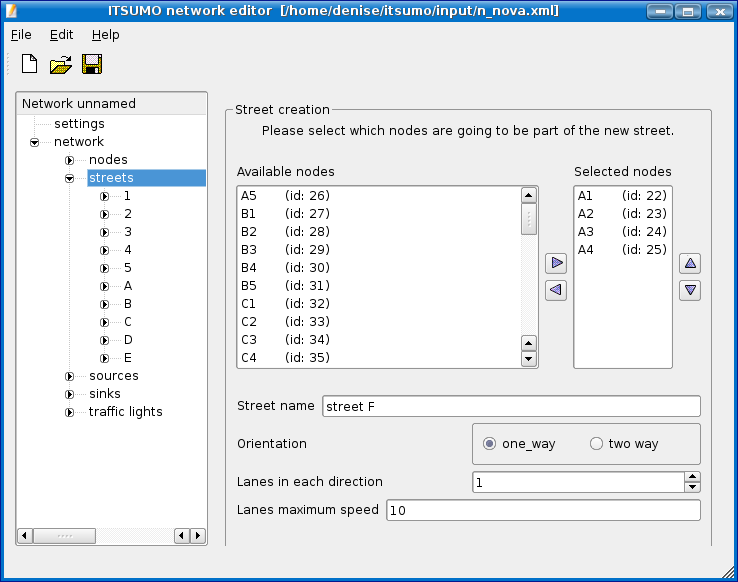
Para criar uma rua, devem ser selecionados os nodos que fazem parte
dela, lembrando que os sinks e sources DEVEM ser incluídos
na rua
- Clique em "streets".
- Na seção "strees creation", selecione
um nodo,
então clique no botão de
inserção, a
ordem de
inserção dos nodos é extremamente
importante,
logo, para uma rua que contenha os nodos n1,n2 e n3,
respectivamente, os nodos devem ser inseridos nessa ordem.
- Repita a operação até que
todos os nodos
pertencentes à rua estejam inseridos.
- Em "street name" escreva o nome da rua.
- Em "orientation, selecione "one_way" para ruas de uma
mão, ou "two_way" para ruas de duas mãos.
- Em "lanes in each direction" escreva quantas faixas tem a
rua,
se a rua tem diferentes números de faixas em
seções
diferentes,
coloque o máximo de faixas que a rua possui, a
remoção e edição de faixas
serão
abordada posteriormente.
- No último campo, selecione a velocidade
máxima na
rua.
Editando as Vias de Circulação
Adicionando e removendo sections
- Para adicionar sections em uma rua, vá em
network->streets, e selecione a rua desejada.
- Clique com o botão direito do mouse na rua e
selecione
"Add new section".
- Edite as configurações da nova section
no painel
"Section edit", que aparecerá no lado direito da
tela.
Para remover uma section, repita o passo 1, então clique com
o botão direito do mouse na section a ser
excluída e
selecione "Delete this section".
Adicionando e removendo lanesets e lanes
A edição das sections é feita de modo
análogo à edição de
streets, vá
em network->streets, e selecione a section a ser editada,
inclusões e exclusões de lanes e lanesets
são
feitas do mesmo modo utilizado para as sections.
Turning
Probabilities
Aqui também são editadas as probabilidades de um
carro
tomar cada direção no nodo. Isso é
feito na
section de onde partem os carros. Vá
em "network", clique em streets, selecione a rua que possui a
section, e finalmente, selecione a section. Na parte direita da
tela aparecerá um painel como na figura abaixo, mostrando as
sections destino, e a chance de um carro ir para cada uma delas.
Você pode editar os valores do campo "Probability", mas a
soma das probabilidades deve ser 100 (caso não seja
possível, use
99,9).
Sinks e sources são nodos que podem colocar ou retirar
veículos da rede, logo eles deve ser criados em nodos
previamente
existente. Um nodo pode, ao mesmo tempo, ser um sink e um
source.
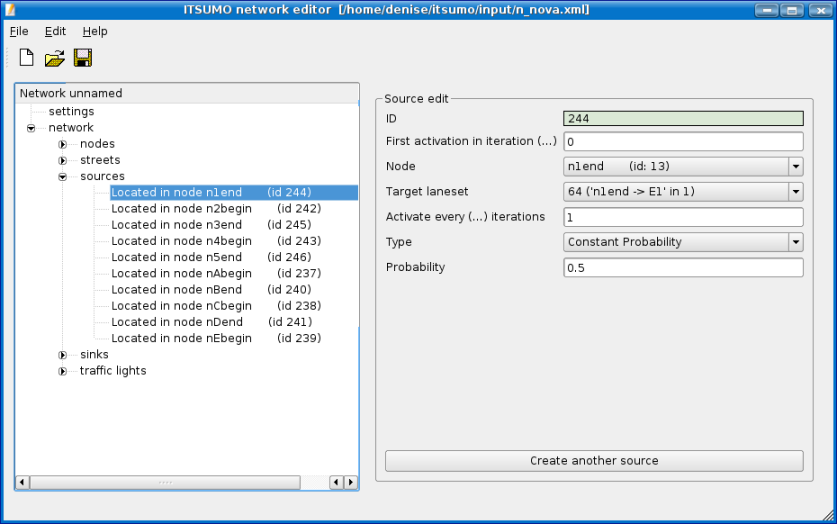
Criando um source:
- Em 'network', clique source.
- Agora no lado direito da tela, clique em "Create a source",
novos campos aparecerão na tela.
- O campo "First activation at iteraction (..) indica a
partir de
qual iteração o source
começará a
funcionar.
- Em "node", selecione o nodo onde o source
será
criado.
- Em "target laneset", seleciona a laneset para onde o source
criará carros.
- Em "Activate every (..) iteractions", escreva a cada
quantas
iterações o source será acionado.
- Em "type", selecione o modo como os carros serão
inseridos, há 4 modos de inserção de
carros:
- Constant Probability: Insere veículos com probabilidade
constante (Vehicles Insertion Rate)
- Variable Probability: Insere veículos com probabilidade
variavel.
- Constant Flow:Insere um número fixo de
veículos em cada
tempo de ciclo.
- Variable Flow:Insere um determinado número
de veículos
em cada tempo de ciclo
Criando um sink:
- Em 'network', clique sink.
- Agora no lado direito da tela, clique em "Create a sink",
novos
campos aparecerão na tela.
- O campo "First activation at iteraction (..) indica a
partir de
qual iteração o sink
começará¡ a
funcionar.
- Em "Removal probability", selecione a probabilidade (de 0 a
1)
de o sink remover um carro que passa por ele.
- Em "Node", selecione o nodo onde o sink será
criado.
- em "Source laneset" selecione a laneset de onde o sink
retirará carros.
Criando os traffic lights:
- Em "network", clique em "traffic lights".
- Escolha o nodo onde o traffic light será criado
e clique
em "Create traffic light".
- Agora você verá uma tela com uma
imagem do nodo
onde o traffic light foi criado, e com o painel "signal plan
edit".
Criando novos signalplans:
A criação de um novo plano semafórico
deve ser
feita em todos os traffic lights, para isso, em "network", clique
em "traffic lights", em seguida, clique com o botão direito
do mouse no traffic light desejado e então em "Add new signalplan",
lembrando que a operação deve ser repetida para
todos
os traffic lights.
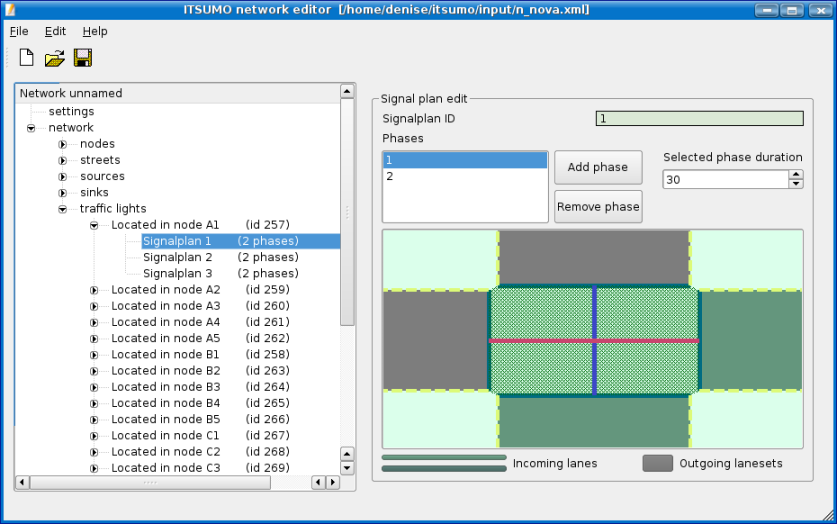
Editando o plano semafórico
Nesse painel serão criadas as fases do plano
semafórico, cada traffic light deve ter pelo menos uma fase:
- Clique em "Add phase".
- Ajuste o tempo de duração da fase em
"Selected
phase duration".
- Agora você deve adicionar os movimentos
permitidos nesta phase, lembrando
que esses movimentos partem das "incoming lanes" e vão para
as "outgoing lanes". Para fazer isso, clique na lane de onde vem o
movimento e arraste
até a laneset alvo, então solte o mouse. Note que
uma
linha colorida será criada, indicando que o movimento
é possível, veja a Figura abaixo. Agora repita a
operação
até
que tenha terminado todos os movimentos possíveis para essa fase,
lembre-se que se um movimento é possível, ele deve partir de
TODAS as lanes da laneset de origem.
* Após a edição dos planos semafóricos, as Turning Probabilities também devem ser reeditadas.
(Voltar ao Topo)
A configuração dos agentes semafóricos
pode
ser feita na aba 'Agent Definition'.
(Voltar ao Topo)
Na aba 'Simulation' é possível executar a
simulação e iniciar a
visualização 3D
dos resultados.
Para rodar a simulação, clique no
botão Run!.
A partir dos parâmetros definidos anteriormente
será
feita a simulação e os resultados salvos nos
arquivos
de log dos sensores configurados na aba 'Configuration'.
Para visualizar os resultados, clicar em Visualize!. Este comando
abrirá uma janela solicitando qual arquivo de log se deseja
visualizar. Após selecionado, a
janela de visualização
3D será aberta e os seguintes comandos são
possíveis:
- 's': inicia a visualização, digitando
's' mais vezes torna a visualização mais acelerada
- 'q': fecha a janela
- segurando o botão esquerdo do mouse e movendo
para:
- cima: zoom in
- baixo: zoom out
- esquerda: move o mapa para esquerda
- direita: move o mapa para a direita
(Voltar ao Topo)
Com a intenção de flexibilizar o desenvolvimento
de
controladores de tráfego foram implementadas as classes
básicas para criação de agentes
semafóricos junto ao simulador ITSUMO. Esses agentes
estão organizados em uma estrutura de dados separada do
simulador, portanto, o usuário não precisa
manipular
a codificação do simulador. Isso viabiliza a
independência desse módulo.
Entre os agentes e o simulador é estabelecida uma
comunicação via sockets, onde são
recebidas todas
informações necessárias para o
processamento
do controle nos agentes, e São enviados os pedidos de
alterações de
configurações ao simulador. Aos agentes cabe
interpretar as
informações recebidas, inferir seu controle e
retornar ao simulador sua ação de controle,
aplicada
sobre um ou mais semáforos na malha viária.
Cada agente aqui é executado em uma thread independente. A
comunicação entre agentes e o simulador
é
estabelecida na porta 30000, via TCP bloqueante, e aceita um
máximo de 50 conexões (o número de
conexões, bem como as características da mesma
podem
ser configuradas nas classes de Sockets presentes na pasta
'src/socket/').
Este documento descreve a implementação que
está sendo disponibilizada junto com o simulador, utilizando
a linguagem de programação C++, bem como a
definição da estrutura necessária para
que
qualquer outra implementação (outra linguagem)
possa
ser implementada seguindo o mesmo padrão. Ou seja,
é
possível desenvolver em Java (por exemplo), via sockets, o
mesmo controle, uma vez que sejam respeitadas as regras.
(Voltar ao Topo)
O código fonte da implementação se
encontra na
pasta '/src/trafficAgents/', onde:
- common.{hh,cc}: definição de
estruturas comuns
necessárias para interpretação da
malha
viária e do controle, como 'lane', 'node', 'signalPlan',
'phase', etc.
- local_agent.{hh,cc}: define um agente local. Um agente
local
controla um determinado número de semáforos (um
ou
mais) e nesse objeto está encapsulada toda a estrutura de
comunicação socket com o simulador
- tlagent.{hh,cc}: define um controlador de
semáforo. Este
objeto diz respeito a um semáforo apenas e possui o
conhecimento da estrutura do semáforo e do nodo controlado
por este. Um local_agent instancia 'n' tlagents, conforme o
número de semáforos controlado por ele
- main.c: arquivo principal onde é lido o arquivo
de
configuração XML e os objetos agentes
são
instanciados, dando início ao controle
- agents.xml: arquivo de configuração
do
módulo de agentes semafóricos. Composto por tags
do
tipo 'agent', cada uma definida por um nome, um estado (ON ou OFF)
e um conjunto de semáforos a serem controlados (dado pelo id
do semáforo definido na criação da
topologia), criado na interface.
Ex.:
<agents>
<agent> <name>Agent_1</name>
<stat>on</stat>
<trafficlights>
<trafficlight>257</trafficlight>
<trafficlight>259</trafficlight>
</trafficlights>
</agent>
<agents>
(Voltar o Topo)
As mensagens trocadas entre agentes e simulador são strings
com as variáveis em questão concatenadas e
separadas
por ';'.
Para realizar a conexão, o agente deve enviar um pedido de
conexão ao simulador, constituído de uma string
iniciada por "a;", seguida pelos ids dos semáforos que
deseja controlar (lembrar da regra de composição
de
mensagens citada no primeiro parágrafo). Ao realizar a
conexão com o simulador o agente recebe uma estrutura de
dados contendo as informações dos
semáforos
que este pretende controlar. Estas informações
são armazenadas na classe TLAgent. Essa mensagem
é
uma string com os campos abaixo:
numberOfTrafficLights
[trafficLightId;
numberOfSignalPlans;
[signalPlanId;
numberOfPhases;
[phaseId;
phaseStartIter;
phaseEndIter;
numberOfOpenDirections;
[fromLane;
toLane;]]]]
Na definição da topologia a ser utilizada na
simulação são definidos dois
parâmetros:
a) sensor interval: define o intervalo no qual o estado da malha
será informado aos agentes.
A cada sensor interval o simulador envia a cada agente conectado
uma mensagem contendo o estado da rede para seus nodos controlados.
Esses campos são interpretados e convertidos em um objeto
'simulationState', que é então armazenado em uma
lista dentro do objeto TLAgent. Essa mensagem é iniciada
pelo string "i;" identificando assim uma mensagem desse tipo.
currentIteration;
numberOfNodes;
[nodeId; trafficLightId; currentPlan;
totalNumberOfIncomingLanes;
[laneId;
laneDensity; laneAvgSpeed; laneCarsStopped]]
Ou seja: a iteração corrente, uma lista dos nodos
e
uma lista das lanes de entrada para o nodo em questão. No
agente essa mensagem é processada pela
função
'pcsInfoMsg', na classe LocalAgent.
O agente após receber essa mensagem deve enviar uma mensagem
de confirmação de recebimento para o simulador.
Atualmente não há
verificação do
conteúdo dessa resposta, e por isso está
implementada
a resposta "OK.". Essa resposta, futuramente pode servir como mais
uma via de troca de informações que se julgar
pertinente.
b) agent interval: define o intervalo no qual aos agentes
será solicitada uma ação de controle.
A cada agent interval é enviada uma
solicitação de controle a cada agente, e este
processa uma mensagem de retorno contendo os ids dos
semáforos que devem sofrer alteração
de
controle e as características do novo signal plan a ser
executado (caso se deseje alterar o controle atual). Essa mensagem
de solicitação de controle, enviada pelo
simulador
é composta pela string "r;", ou seja, há um
'request'
para os agentes. O formato da mensagem de resposta dos agentes
obedece o seguinte esquema:
trafficLightId;
[signalPlanId;
numberOfPhases;
[phaseId;
phaseStartIter;
phaseEndIter;]]
No início da execução do itsumo,
é dado
um tempo de espera para que sejam registradas as conexões
dos agentes.
Deve ser lembrado que o controle a ser efetuado deve ser programado
pelo usuário nas classes acima descritas e após
deve
ser recompilado o conjunto. A lógica de controle deve ser
implementada no objeto 'TLAgent', mais especificamente na
função 'newControlState()'.
Resumo do protocolo:
Protocolos de comunicação agente
<->
simulador:
- Simulador inicia a execução e por 10
segundos
ficam esperando pedidos de conexão de eventuais agentes;
- Os agentes se conectam ao simulador enviado pedido via
socket.
O pedido de conexão é uma string no formato
abaixo: "a;id1;id2;", onde "a" é o identificador do tipo de
mensagem
(a = pedido de conexão) e "id1", "id2", etc
são os identificadores dos semáforos a serem
controlados.
- Ao receber o pedido de conexão de um agente, o
simulador
confirma a conexão respondendo com uma mensagem contendo os
dados dos semáforos que o agente requisitou o
controle. Essa mensagem é uma string no formato
abaixo:
- c;numberOfTrafficLights; [trafficLightId;
numberOfSignalPlans;
[signalPlanId; numberOfPhases; [phaseId; phaseStartIter;
phaseEndIter; numberOfOpenDirections; [fromLane; toLaneset;]]]]
- Um exemplo seria: o agente pediu para controlar o
semáforo 6 e o 9, ambos têm um signal plan de id
55 com
apenas uma fase de id 77 que inicia na iteração 0
e
termina na iteração 59 (no contexto do ciclo).
Para
esse caso, assumindo qualquer valor para lanes e lanesets de
origem/destino, a string recebida pelo agente deve ficar:
- "c;2;6;1;55;1;77;0;59;1;33;44;9;1;55;1;77;0;59;1;22;88;"
- Essa mensagem, recebida pelo agente, é
interpretada e usada
posteriormente para o controle (pois tem as
informações do semáforo a ser
controlado).
- Com os passos 2 e 3 está estabelecida a
condição básica de
operação em
ambos os lados.
- A cada 'sensor interval', o simulador envia a cada agente
uma mensagem de
informação dos estados dos nodos relativos aos
semáforos que cada agente controla (*apenas dos
semáforos controlados, não de toda
rede*).
- Essa
mensagem é uma string no formato abaixo:
- i;currentIteration; numberOfNodes; [nodeId;
trafficLightId;
currentPlan; totalNumberOfIncomingLanes; [laneId; laneDensity;
laneAvgSpeed; laneCarsStopped]]
- Um exemplo, para o caso descrito no item 3 seria:
"i;100;2;5;6;1;1;21;0;0;0;8;9;1;1;21;0;0;0;"
- Se a construção dessas mensagens
for feita em
outro código fonte (outra linguagem por exemplo), as
funções já implementadas podem ser
tomadas
como base.
- O agente responde ao envio de uma mensagem de
informação (descrita no item 5) com uma string de
confirmação: "OK.".
- A cada 'agent interval' o simulador manda um pedido de
atuação aos agentes. Esse 'request' é
uma
string do tipo "r;".
- Ao receber uma mensagem como a descrita no item 7, o agente
processa seus dados e deve responder com uma mensagem indicando as
alterações que deseja fazer nos
semáforos.
Essa mensagem é descrita abaixo:
- x;numberOfTrafficLights; [trafficLightId; [signalPlanId;
numberOfPhases; [phaseId; phaseStartIter; phaseEndIter;]]]
- Por exemplo, usando o caso do item 3, vamos mudar para
o
semáforo 6, e alterar o período da fase 77:
"x;6;55;1;77;0;39;"
- Caso não se quisesse alterar a fase, mas
apenas mudar o plano atual para 55, a mensagem seria: "x;6;55;"
(Voltar
Topo)
Um modelo de motorista deve definir o comportamento de um
motorista, no âmbito de simulação,
frente
às questões tipicamente encontradas no
tráfego, como escolha de rota, velocidade escolhida para
tráfego, troca de pistas, etc. O processo de modelagem de
motoristas constitui uma tarefa de grande importância no que
diz respeito à representatividade dos resultados da
simulação. O planejamento do comportamento do
motorista passa a ser crítico para a correta
avaliação da malha viária ou de uma
situação de tráfego, e mesmo assim,
qualquer
resultado em simulação deve ser relacionado ao
modelo
específico de motorista usado. Ainda não se tem
modelos precisos de como funciona o processo de raciocínio
humano, tornando a tarefa de modelagem mais complexa, quando os
objetivos são atingir os resultados mais realistas
possíveis para aplicação de
decisões na
vida real.
Implementar módulos de motoristas diretamente na fonte do
simulador, usando a linguagem de programação C++,
consiste na forma mais flexível para a
determinação do comportamento de um motorista no
simulador ITSUMO, independentemente do paradigma a ser usado.
Isso exige que o usuário conheça e tenha uma
certa
experiência com a linguagem e ambientes de
programação para a linguagem em
questão.
Também deve ser lembrado que o programador deve conhecer a
estrutura de dados e da implementação do
simulador,
de forma tirar proveito dessas para descrever o motorista.
Tipo do erro:
- Instalação.
- Erro: "qmake: Command not found"
- Solução: Verificar a
existência do
binário 'qmake' no diretório 'bin' da
instalação do qt. Caso não exista, o
qt
não foi instalado corretamente, sendo necessário
tentar reinstalar. Caso exista o binário, há um
problema de linkagem, possível de ser corrigido
através da criação de um link
simbólico
do 'qmake' na pasta '/usr/bin/'. Para isso: "ln -s <caminho_do_qmake> /usr/bin/qmake".
- Visualização.
- Erro: "freeglut ERROR: Function
<glutcreatewindow> called
without first calling 'glutInit'."
- Solução: Esse é um erro
presente em
algumas
versões da biblioteca freeglut (em particular na
versão 2.4). Para contorná-lo é necessário
fazer
um downgrade para a versão 2.2-83 dessa biblioteca.
(Voltar
Topo)