







![]() DAUDT, G.,
DEUS, A.,
KOLBERG, M.,
MAFFEI, R. Q.,
k-Robust Conflict-Based Search with Continuous time for Multi-robot Coordination.
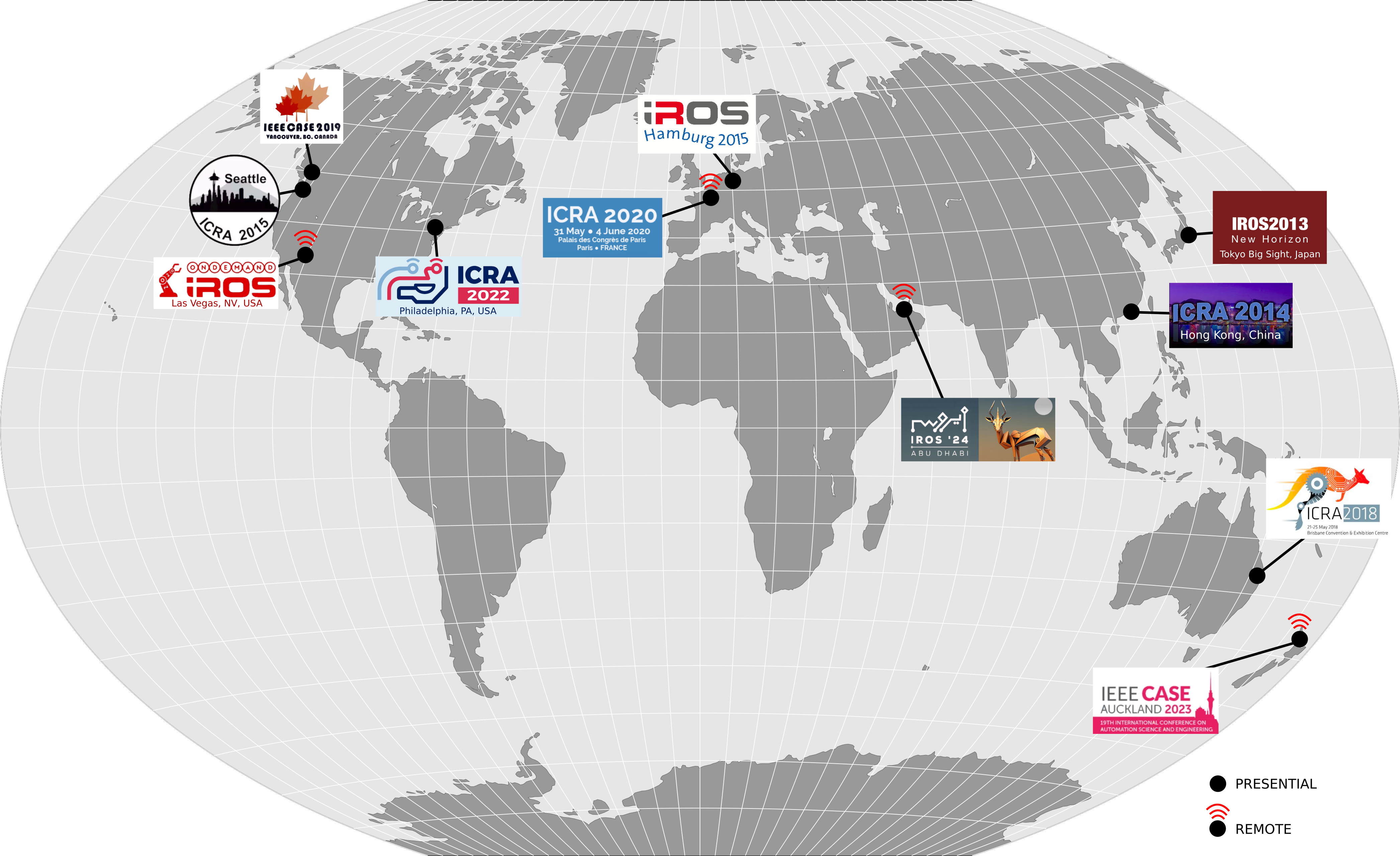
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, UAE. 2024
DAUDT, G.,
DEUS, A.,
KOLBERG, M.,
MAFFEI, R. Q.,
k-Robust Conflict-Based Search with Continuous time for Multi-robot Coordination.
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, UAE. 2024

![]() STEIN, G.,
PITTOL, D.,
MANTELLI, M.,
KOLBERG, M.,
PRESTES, E.
MAFFEI, R. Q.,
Using buildings proximity information in UAV global localization over satellite images.
In: 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 2023.
STEIN, G.,
PITTOL, D.,
MANTELLI, M.,
KOLBERG, M.,
PRESTES, E.
MAFFEI, R. Q.,
Using buildings proximity information in UAV global localization over satellite images.
In: 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 2023.

![]() MANTELLI, M.,
DOS SANTOS, L.,
FRAGA, L.,
MIOTTO, G.,
BERGAMIN, A.,
CARDOSO, E.,
SERRANO, M.,
MAFFEI, R. Q.,
PRESTES, E.
NETTO, J.,
KOLBERG, M.,
Autonomous Environment Disinfection Based on Dynamic UV-C Irradiation Map..
In: 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA. 2022.
MANTELLI, M.,
DOS SANTOS, L.,
FRAGA, L.,
MIOTTO, G.,
BERGAMIN, A.,
CARDOSO, E.,
SERRANO, M.,
MAFFEI, R. Q.,
PRESTES, E.
NETTO, J.,
KOLBERG, M.,
Autonomous Environment Disinfection Based on Dynamic UV-C Irradiation Map..
In: 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, USA. 2022.

![]() MAFFEI, R. Q.,
PITTOL, D.,
MANTELLI, M.,
PRESTES, E.,
KOLBERG, M.
Global Localization Over 2D Floor Plans with Free-Space Density Based on Depth
Information.
In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA. 2020.
MAFFEI, R. Q.,
PITTOL, D.,
MANTELLI, M.,
PRESTES, E.,
KOLBERG, M.
Global Localization Over 2D Floor Plans with Free-Space Density Based on Depth
Information.
In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA. 2020.

![]() MAFFEI, R. Q.,
SOUZA, M. P.,
MANTELLI, M.,
PITTOL, D.,
KOLBERG, M.,
JORGE, V. A. M.
Exploration of 3D Terrains Using Potential Fields with Elevation-Based Local
Distortions.
In: 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France. 2020.
MAFFEI, R. Q.,
SOUZA, M. P.,
MANTELLI, M.,
PITTOL, D.,
KOLBERG, M.,
JORGE, V. A. M.
Exploration of 3D Terrains Using Potential Fields with Elevation-Based Local
Distortions.
In: 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France. 2020.

![]() PERDOMO, L.,
PITTOL, D.,
MANTELLI, M.,
MAFFEI, R. Q.,
KOLBERG, M.,
PRESTES, E.
c-M2DP: A Fast Point Cloud Descriptor with Color Information to Perform Loop Closure
Detection.
In: 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, Canada.
2019.
PERDOMO, L.,
PITTOL, D.,
MANTELLI, M.,
MAFFEI, R. Q.,
KOLBERG, M.,
PRESTES, E.
c-M2DP: A Fast Point Cloud Descriptor with Color Information to Perform Loop Closure
Detection.
In: 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, Canada.
2019.

![]() RIBACKI, A.,
JORGE, V. A. M.,
MANTELLI, M.,
MAFFEI, R. Q.,
PRESTES, E.
Vision-based Global Localization using Ceiling Space Density.
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia. 2018.
RIBACKI, A.,
JORGE, V. A. M.,
MANTELLI, M.,
MAFFEI, R. Q.,
PRESTES, E.
Vision-based Global Localization using Ceiling Space Density.
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia. 2018.

![]() MAFFEI, R. Q.,
JORGE, V. A. M.,
REY, V. F.,
FRANCO, G. S.,
GIAMBASTIANI, M. T.,
BARBOSA, J. D.,
KOLBERG, M. and
PRESTES, E.
Using n-grams of spatial densities to construct maps.
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany. 2015.
MAFFEI, R. Q.,
JORGE, V. A. M.,
REY, V. F.,
FRANCO, G. S.,
GIAMBASTIANI, M. T.,
BARBOSA, J. D.,
KOLBERG, M. and
PRESTES, E.
Using n-grams of spatial densities to construct maps.
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany. 2015.

![]() MAFFEI, R. Q.,
JORGE, V. A. M.,
REY, V. F.,
KOLBERG, M. and
PRESTES, E.
Fast Monte Carlo Localization Using Spatial Density Information.
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA. 2015.
MAFFEI, R. Q.,
JORGE, V. A. M.,
REY, V. F.,
KOLBERG, M. and
PRESTES, E.
Fast Monte Carlo Localization Using Spatial Density Information.
In: 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA. 2015.

![]() MAFFEI, R. Q.,
JORGE, V. A. M.,
PRESTES, E. and
KOLBERG, M.
Integrated exploration using time-based potential rails.
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong. 2014.
MAFFEI, R. Q.,
JORGE, V. A. M.,
PRESTES, E. and
KOLBERG, M.
Integrated exploration using time-based potential rails.
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong. 2014.

![]() MAFFEI, R. Q.,
JORGE, V. A. M.,
KOLBERG, M. and
PRESTES, E.
Segmented DP-SLAM.
In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan. 2013.
MAFFEI, R. Q.,
JORGE, V. A. M.,
KOLBERG, M. and
PRESTES, E.
Segmented DP-SLAM.
In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan. 2013.
![]() MADHAVAN et al., 2014 Humanitarian Robotics and Automation Technology Challenge [Humanitarian Technology].
RAM, v21, p10-16, 2014.
MADHAVAN et al., 2014 Humanitarian Robotics and Automation Technology Challenge [Humanitarian Technology].
RAM, v21, p10-16, 2014.
![]() MADHAVAN et al., 2015 Humanitarian Robotics and Automation Technology Challenge [Humanitarian Technology].
RAM, v22, p182-184, 2015.
MADHAVAN et al., 2015 Humanitarian Robotics and Automation Technology Challenge [Humanitarian Technology].
RAM, v22, p182-184, 2015.
![]() PRESTES et al., The 2016 Humanitarian Robotics and Automation Technology Challenge [Competitions].
RAM, v23, p23-24, 2016.
PRESTES et al., The 2016 Humanitarian Robotics and Automation Technology Challenge [Competitions].
RAM, v23, p23-24, 2016.

IEEE RAS Sight - Organizer.

Robot: Husky with a metal detector.
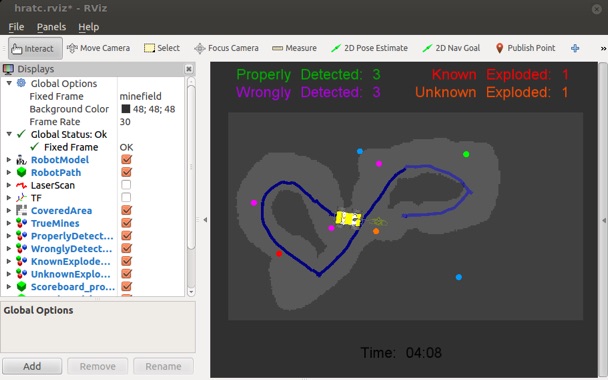
HRATC Control panel (in Rviz).