This ROS package implements the Monte Carlo Localization technique using Free-Space Density (FSD) as
observation model.
source code:
![]()
related paper:
Maffei et al.
Global Localization Over 2D Floor Plans with Free-Space Density Based on Depth
Information.
IEEE IROS 2020.
![]()
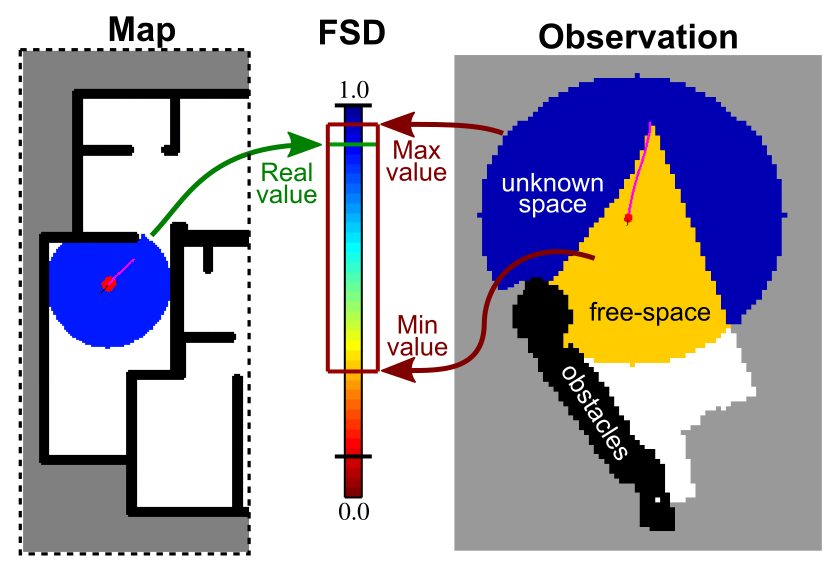
Localization based on free-space information given by a kernel density estimate computed in the robot position.
related paper:
![]()
related paper:
![]()