
Este pacote do ROS implementa a técnica de Localização de Monte Carlo usando Densidade de Espaço Livre (Free-Space Density - FSD) como modelo de observação.
código-fonte:
![]()
paper relacionado:
Maffei et al.
Global Localization Over 2D Floor Plans with Free-Space Density Based on Depth Information.
IEEE IROS 2020.
![]()
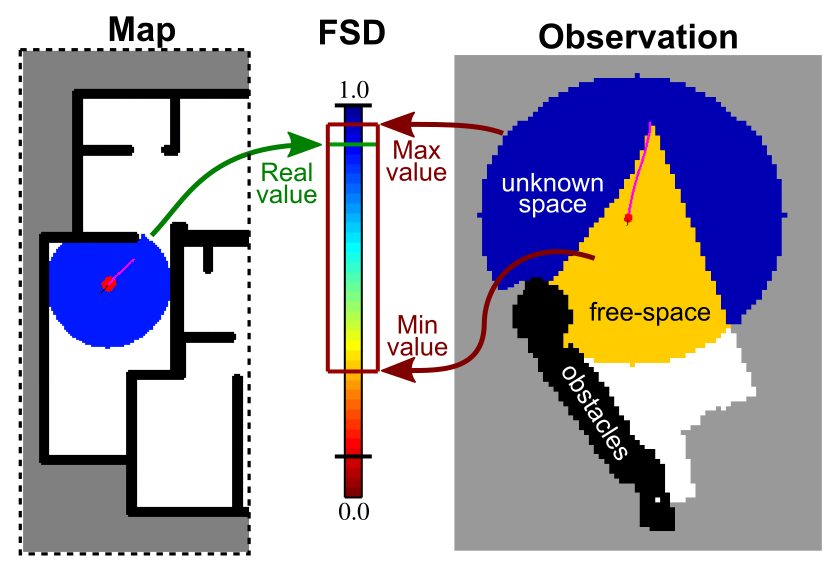
Localização baseada em informação de espaço livre dada por uma estimativa de densidade de kernel computada na posição do robô.
paper relacionado:
![]()
paper relacionado:
![]()