
Este projeto trata do desenvolvimento de técnicas de navegação autônoma coordenada multi-robôs, que é um tema de grande relevância nos dias de hoje. A demanda por robôs móveis autônomos já vinha crescendo, e isso aumentou consideravelmente com a crise sanitária de 2020, em que as circunstâncias exigiram a criação de novas soluções para problemas do nosso dia a dia. Times de robôs autônomos podem ser usados pra uma série de aplicações, indo desde carregamento e entrega de produtos até vigilância e monitoramento de ambientes. O objetivo principal deste projeto é propor soluções novas para navegação coordenada multi-robôs, focando em aplicações de varredura e monitoramento de ambientes e carregamento de objetos. Dentre os resultados esperados podemos citar o desenvolvimento de estratégias robustas para o problema de planejamento de caminhos e coordenação multi-robôs, que é uma área com uma série de desafios em aberto e grande potencial para avanços científicos. Além disso, espera-se que soluções propostas no âmbito deste projeto possam ser utilizadas em aplicações práticas sendo desenvolvidas em parceria com o setor privado.
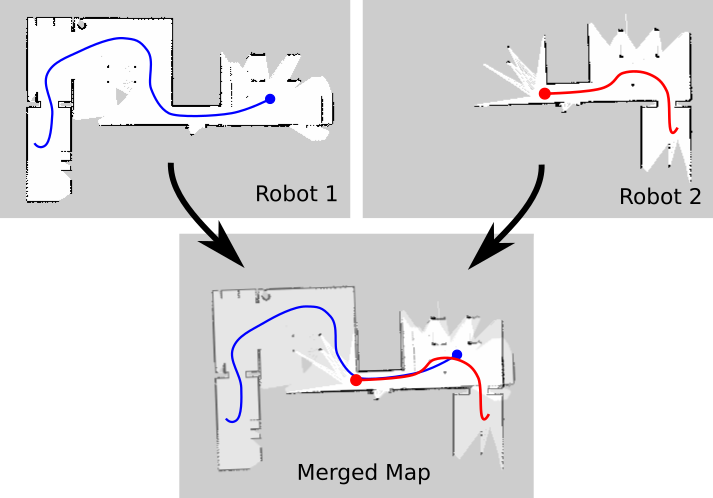
Construção de mapa global a partir de mapas individuais de múltiplos robôs.
Projeto desenvolvido em parceria com a empresa Instor Projetos e Robótica.
O Objetivo do projeto é desenvolver JACI, o primeiro robô autônomo brasileiro para desinfecção por radiação UV-C e geração de ozônio.
JACI está sendo proposto como uma potente ferramenta de combate à COVID-19, já que o uso de luzes UV-C inibem a proliferação de vírus e germes.
A JACI aumenta a eficiência e reduz o custo por se tratar de um robô movel.
A combinação de um robô móvel autônomo, luzes UV e ozônio se apresenta como uma forte solução para evitar a proliferação do vírus SARS-COV-2.
Esta solução garante que a luz UV seja utilizada para neutralizar o vírus e outras bactérias e germes presentes no ambiente,
ao mesmo tempo que reduz ao máximo o tempo de exposição de humanos aos efeitos colaterais da luz UV.
A capacidade do robô ser autônomo permite que ele desvie de obstáculos ou pessoas presentes no ambiente,
enquanto traça sua trajetória de modo que preserve as restrições de funcionamento da luz UV, i.e. distância mínima entre a luz e superfícies.
Para tal o robô deve ser capaz de se movimentar autonomamente com segurança por um ambiente, sendo preciso mapear eventuais obstáculos contidos nele,
a fim de cobrir todo o local (considerando o raio de ação do elemento desinfectante).
O projeto apresenta uma série de desafios na área de robótica móvel, como a auto-localização, mapeamento, planejamento de trajetórias
e exploração do ambiente.
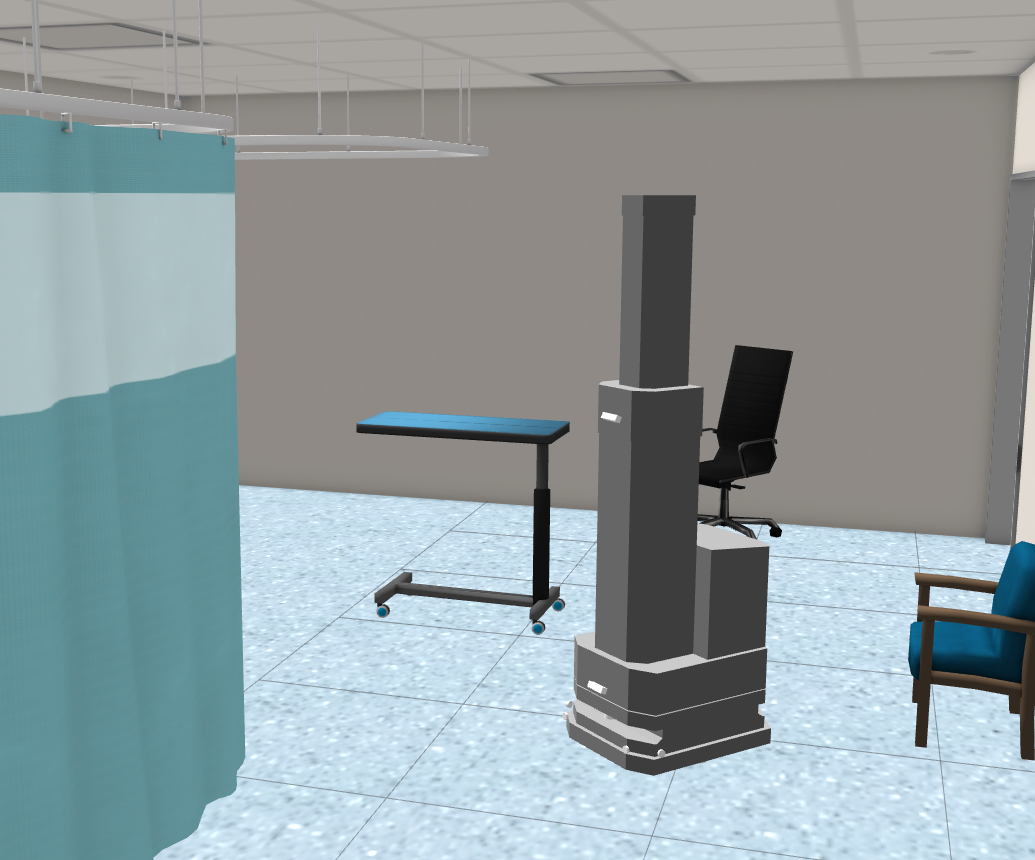
Simulação do robô Jaci em desinfecção de ambiente hospitalar.
O projeto tem como objetivo o desenvolvimento de um SLAM Semântico de longo prazo que seja robusto a alterações no ambiente, permitindo que robôs possam operar em ambientes internos não controlados, em aplicações que exigem longos períodos de execução. Além do fator de longo prazo, a importância do uso de informações semânticas também se dá pelo mapa resultante, que permitirá a execução de outras tarefas colaborativas entre robôs e entre robôs e humanos. Este projeto dá continuidade às pesquisas na área de robótica realizadas pelo grupo de robótica móvel do Instituto de Informática da UFRGS, em particular, abordando o paradigma de navegação autônoma, mapeamento e localização de robôs heterogêneos.
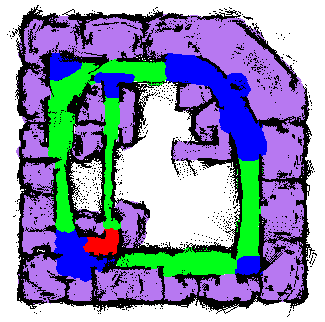
Mapa semântico de um ambiente.