
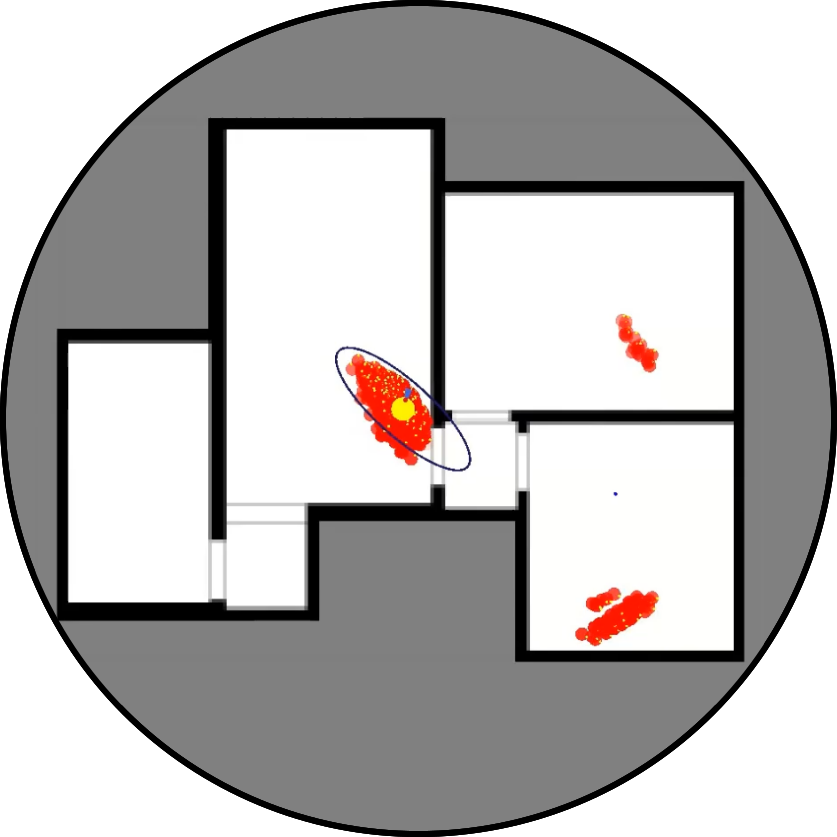
Localização Global
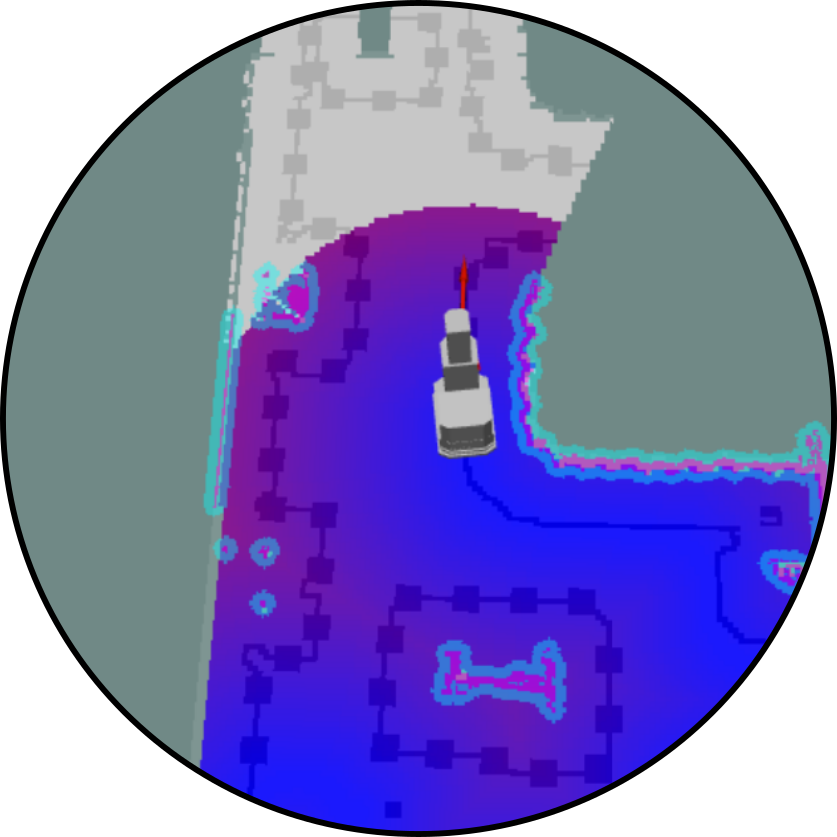
Exploração Autônoma
Localização e Mapeamento Simultâneos (SLAM)
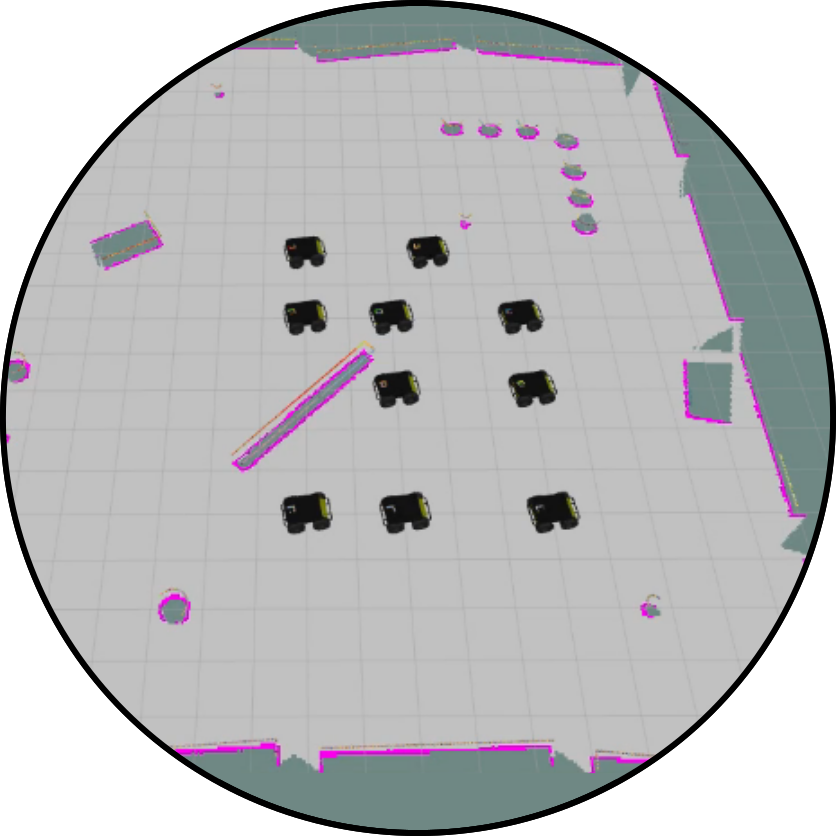
Navegação Multi-robôs
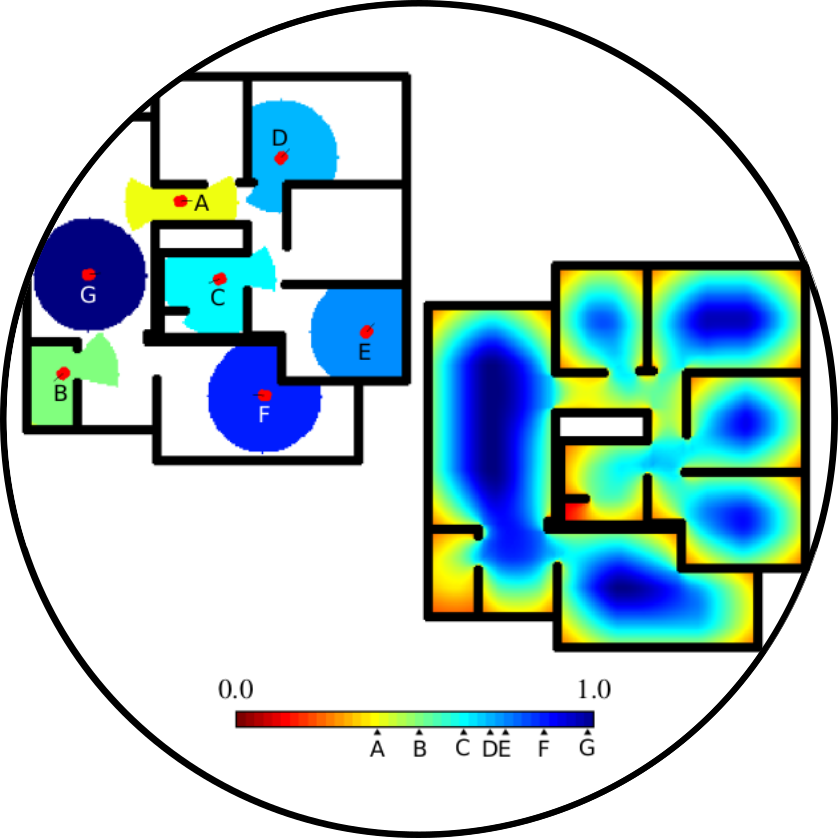
Estimativa de pose sobre plantas baixas usando densidade espacial
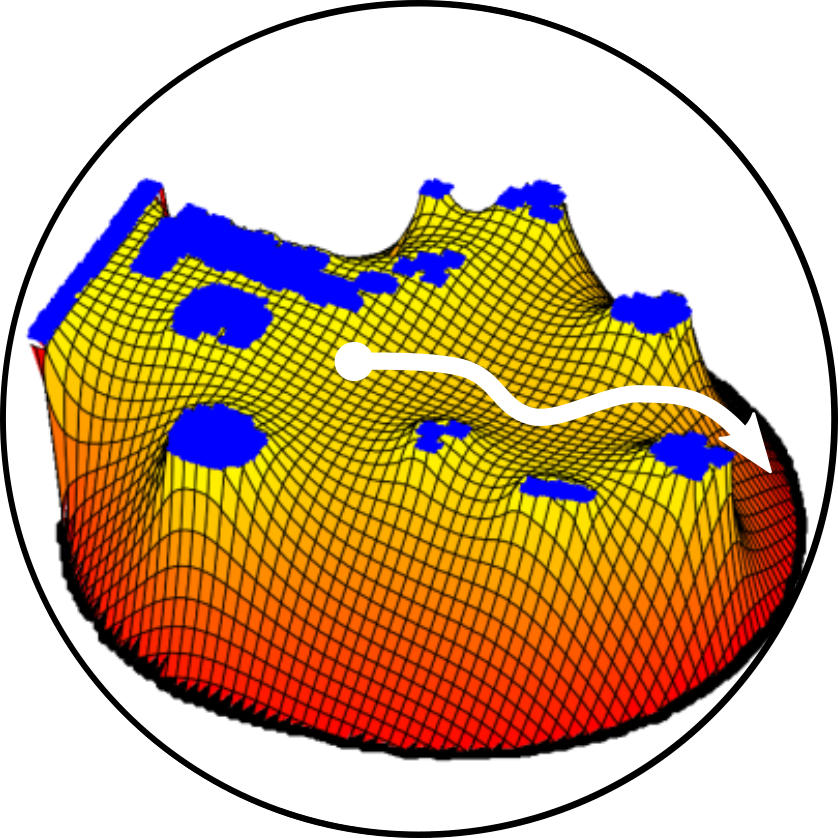
Navegação usando Campos Potenciais
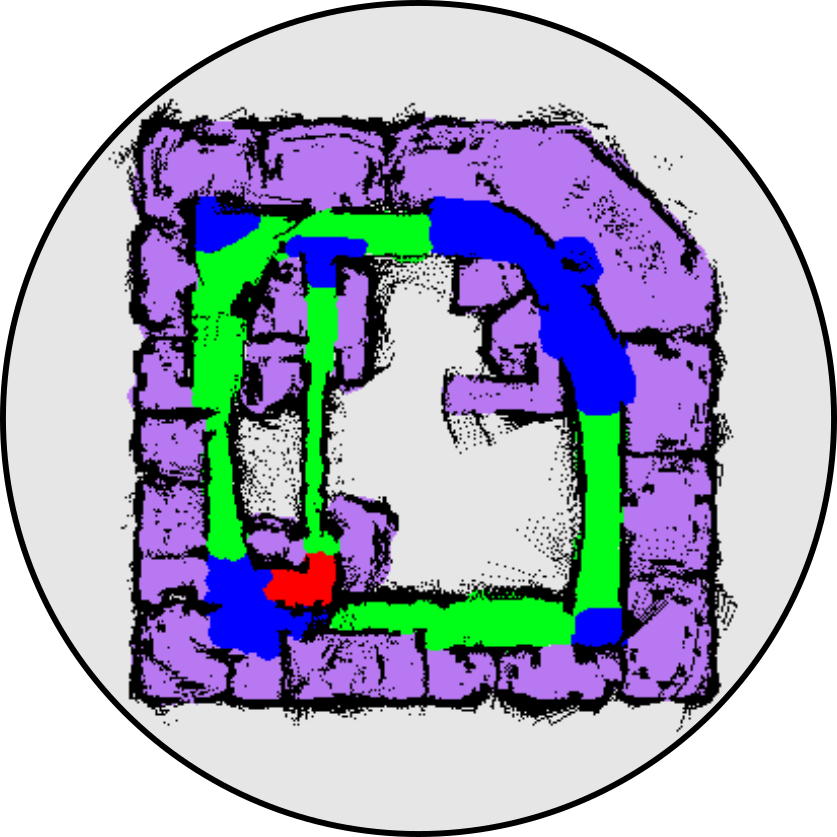
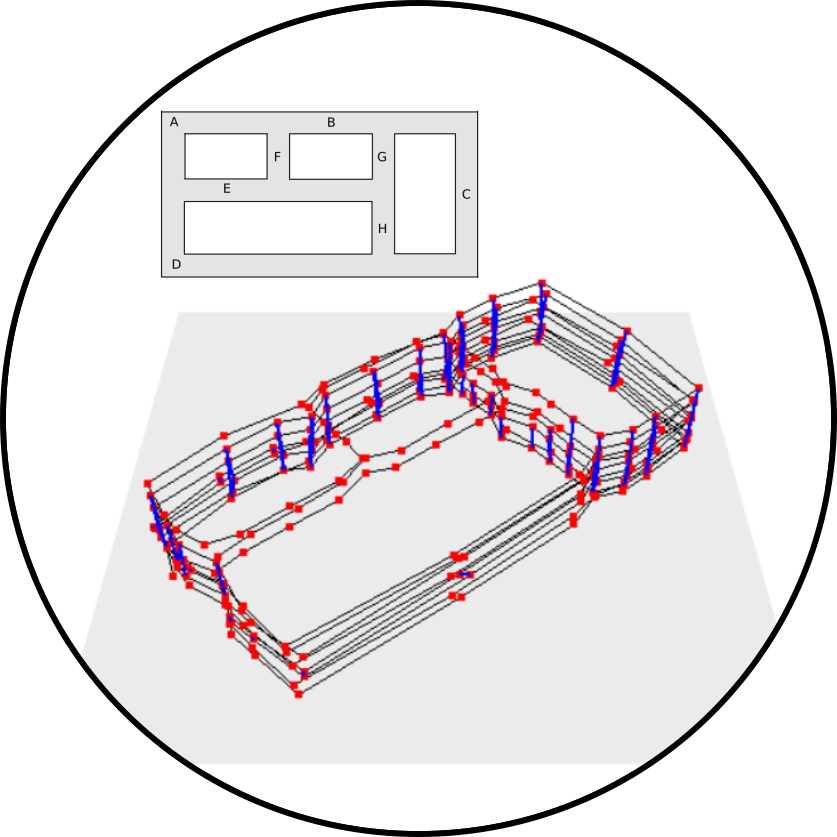
Mapeamento Semântico
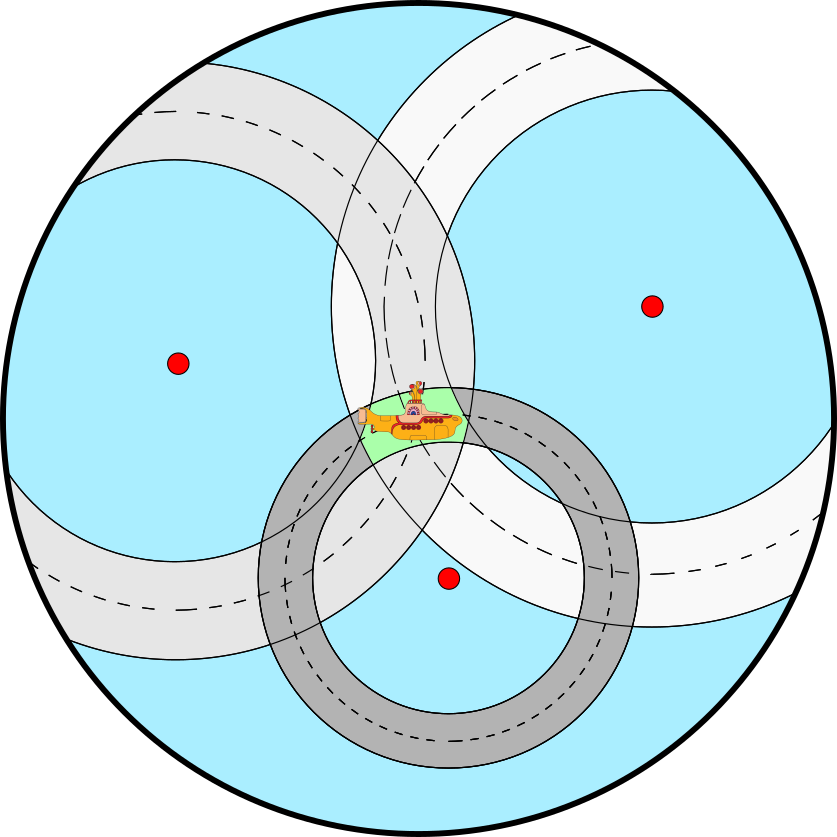
Estimativa de estados baseada em Aritmética Intervalar

Localização aérea sobre imagens de satélite

Robótica Humanitária

Reconhecimento de locais usando visão computacional
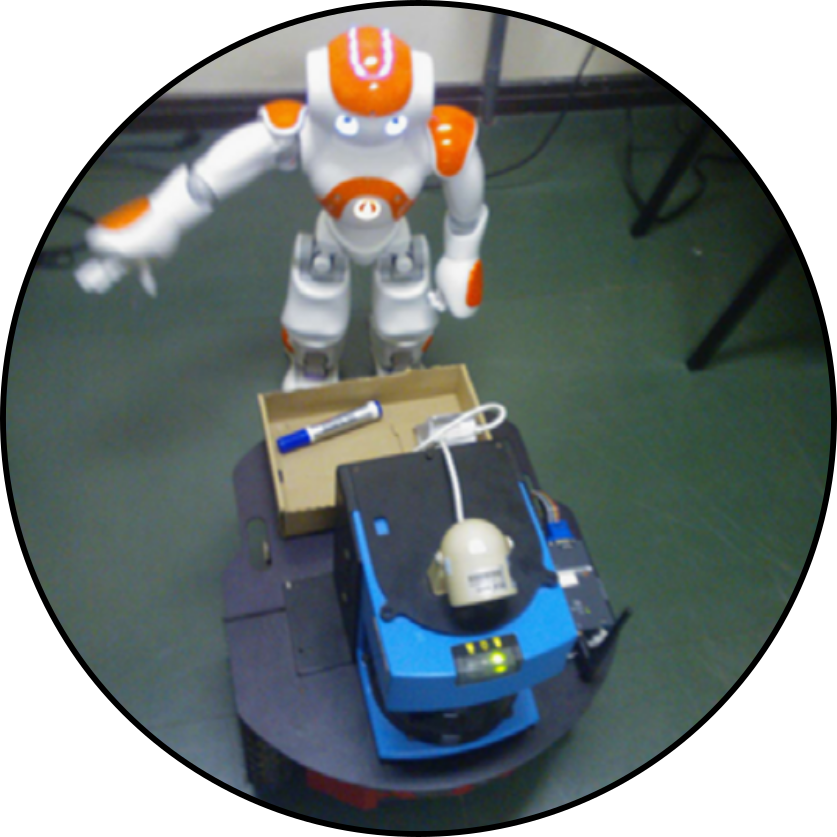
Cooperação entre robôs heterogêneos